この記事では、AIロボットのFR-1が大学生のレイさんに、WRS2025過酷環境F-REIチャレンジの競技の一つ「標準性能評価ドローンチャレンジ(STM)」について、その目的と意義、ルールについて解説しています。
FR-1: レイさん、こんにちは!今日は「WRS2025過酷環境F-REIチャレンジ」の中でも、
「標準性能評価ドローンチャレンジ」、略して STMについてご紹介しますね。
レイ : FR-1先生、こんにちは!STMチャレンジ、名前に性能評価って付いているけど、どんな目的があるの?
FR-1: はい、STMチャレンジの主な目的は、過酷な環境下でのドローンの社会実装を促進することです。
具体的には、災害現場などで想定される様々な過酷な環境因子を導入し、そのような状況で
ドローンがどれだけの性能を発揮できるかを評価します。
レイ:社会実装ってことは、実際に災害が起きたときに役立つドローンを開発するってことね!
では、「標準性能」っていうのはどういう意味?
FR-1:良い質問ですね! このチャレンジは、米国NIST(国立標準技術研究所)が進めている災害対応ロボット・ドローンの標準性能試験法(Standard Test Methods for performance, STM)や、NEDO(新エネルギー・産業技術総合開発機構)のReAMoプロジェクトで開発されている、制約環境下でのドローンの性能評価手法を基本にしています。これらの手法を組み合わせることで、共通基盤的な性能を繰り返し、再現可能で、低価格、かつ定量的に評価し、社会実装を支援することを目指しているのです。将来的には、これらの評価手法をドローンスクールなどに展開し、デファクトスタンダード(事実上の標準)として推進したり、ASTMといった国際規格との連携によるデジュールスタンダード(公式な標準)化も検討されています。
レイ:なるほど! じゃあ、漠然と「すごいドローン」って言うんじゃなくて、客観的な基準で「ここがすごい!」って評価されるわけね。
それじゃあ、このSTMチャレンジに参加するドローンには、どんなルールがあるのかしら?例えば、どんな機体を使えるの?
FR-1:はい、ルールについて詳しく説明しますね。まず、ロボットの形態や台数に制限はありません。クローラ型やドローン型など、フィールドのタスクを実行できる移動形態であれば、どんなロボットでも参加できます。また、遠隔操縦型、自律型のいずれでも可能ですが、競技中にロボットやフィールドを直接目視することはできません。
レイ:え、直接見ちゃダメなの?それは大変そう!大きさとか重さは?
FR-1:はい、直接目視ができないのは、実際の災害現場を想定しているからです。機体については、総重量は10kg以下。そして、ロボット本体だけでなく付属機器全てを含めて、三辺合計が1.5mの直方体に収まる必要があります。ただし、競技課題に応じてフィールドごとにオプション機材を取り付けることは可能です。
レイ:結構コンパクトじゃないとダメなのね。あと、飛行に関する注意点とかはある?
FR-1:はい、回転翼を持つドローンには必ずガードを取り付ける必要があります。また、操縦者は1名、ナビゲーター(操縦者の補助)は1名とされています。操縦者の交代は競技中に認められます。あと、大事な点として、耐環境性を有するロボットは得点に重み付けがされます。例えば、防水性や防爆性の証明書があれば得点が2倍に、独自評価でも1.2倍になる可能性があります。
レイ:防水とか防爆とか、過酷な環境に強いドローンが有利になるのね!他にはどんな評価項目があるの?
FR-1:STMチャレンジでは、主に以下の4つの性能が評価されます。
1.運動性能(MOB): 競技フィールドの往復回数が評価されます。通信遅延(COM)環境下で飛行した場合は得点が2倍に、
完全自律で飛行した場合は10倍に重み付けされます。
2.探査性能(EXP): ミッションの完遂度が評価の対象です。
○知覚ミッションでは、熱画像識別や有害物質ラベルの識別、物体の運動検知、QRコードの自動認識、近接磁力計による磁石検知、
クラックやサビの自動認識と割合表示などが含まれます。
○作業ミッションでは、ペアバケツ底部確認、バケツ内のランドルト環読み取り、サンプルへの接触および回収、拭き取り作業、
そして傾斜面や垂直面、天井に静止して作業する「パーチ」などが評価されます。こちらも自律探査でない課題は、通信遅延で2倍、
完全自律で10倍の得点となります。
3.地図生成能力(MAP): 競技フィールドの地図生成や、探査対象の位置推定と意味理解、それらの情報の地図内埋め込み性能が評価されます。
競技終了直後の「リアルタイムマップ」と、処理時間を経た後の「詳細地図」の2種類で評価が行われ、基本的に3次元
地図が求められます。
4.自律性能(AUT): MOBとEXPの自律化のレベルに応じて評価されます。通信遅延(COM)環境下での自律飛行は2倍、
完全自律飛行は10倍に得点が重み付けされます。
レイ:自律飛行だと点数がグンと上がるのね!やっぱりロボットには自分で考えて動いてほしいってことね。
ところで、「過酷環境」って具体的にどんなフィールドでどんな状況を想定しているの?
FR-1:STMチャレンジの競技フィールドは、大きく分けて4種類あります。
●狭隘空間水平スラローム(図1): 幅2〜3m、高さ2〜3mの閉鎖空間に、高さ2〜3m、幅1〜1.5mの縦長の開口部が左右交互に配置された
フィールドで、水平方向の移動能力が評価されます。
●狭隘空間垂直スラローム(図2): こちらは、水平壁に設けられた開口部を通過しながら、上下方向に移動する能力が評価されるフィールド
です。
●トラスフィールド(図3): パイプで構成された正四面体と三角柱を組み合わせたトラス状のフィールドで、傾斜した開口部を通過する能力
が求められます。
●複合型(シークレットフィールド): これは、これまでの3種類の基本単位を組み合わせたり、独自の構造物を用いたりするフィールドで、
競技当日に公開されます。
これらのフィールドはすべて動的な環境変化を伴うことがあります。
レイ:わぁ、閉鎖空間での狭い通路をくぐったり、斜めになってる場所を移動したり、色々な状況があるのね!それはまさに過酷環境だわ。
さらに「過酷環境因子」が追加されることもあるって聞いたんだけど?
FR-1:はい、STMチャレンジでは、もともと狭隘かつ閉鎖空間、そして非GPS環境という過酷な因子が含まれています。
それに加えて、以下のような因子が導入・検討されています。
●狭隘開口部(TRA): 消防のブリーチングによる開口部形状に基づいた正三角形や正方形の狭い開口部を通過します。
●風(WND): 送風機でフィールドの特定セグメントに風を起こし、ドローンに外乱を与えます。
●閉鎖空間: 特定セグメントを壁で囲み、回転翼による気流の乱れが発生する中で作業を行います。
●粉塵(DST): プロペラのダウンウォッシュで紙片などが舞い上がる状況を設定します。
●煙: フォグマシンやドライアイスで競技フィールドに煙を充満させ、視界不良の環境を作り出します。
●強光: 強い光源を置いたり、自然光を利用したりして、強い光の中で作業を行います。
●暗所: 特定のセグメントを暗くし、暗闇の中での移動や探査を求めます。
●ネゴシエイト(NEG): 開口部に可動壁や紐、ケーブルのような索状柔軟障害物を配置し、
それに接触して空間を作りながら通過する能力が評価されます。
●雨(防滴防水性): 競技は原則雨天決行で、防水対策が必須です。防滴防水性を証明できる場合は得点が2倍になります。
●可燃性物質(防爆性): 可燃性物質や爆発物の存在を想定し、防爆性能が証明できる場合は得点が2倍になります。
レイ: うわぁ、風や煙の中を飛んだり、紐が絡まってるところを抜けたり、本当に現実の災害現場みたいね!
安全に競技するために、他に何かルールはあるの?
FR-1: はい。安全確保も非常に重要です。
●競技フィールドには「コールドゾーン」と「ホットゾーン」が設定されています。コールドゾーンは安全が確保された領域で、
離着陸が可能です。ここでなら修理やバッテリー交換、オペレータ交代もできますが、競技時間は止まりません。
ホットゾーンは災害発生領域であり、修理やバッテリー交換はできません。
●ロボットが走行不能になったり、競技の続行が困難になったりした場合に「リセット」を申請し、人の手で復帰させることも可能ですが、
その際にはペナルティとして再開まで1分から2分間、競技が中断されます。
●また、フィールドへの破損やドローンの墜落には減点や失格の対象となるペナルティが課されます。
●チームメンバーは、ヘルメットやゴーグルなどの適切な保護具の着用が義務付けられています。
レイ: 色々な厳しい条件が想定されているのね。でも、それだけ技術が試されるってことだものね!
STMチャレンジの目的やルール、とてもよく理解できたわ。ありがとう、FR-1!
FR-1: どういたしまして、レイさん! このSTMチャレンジが、ドローン性能評価の国際標準化への取り組みと、
未来の災害対応ロボットの開発に貢献することを願っています。
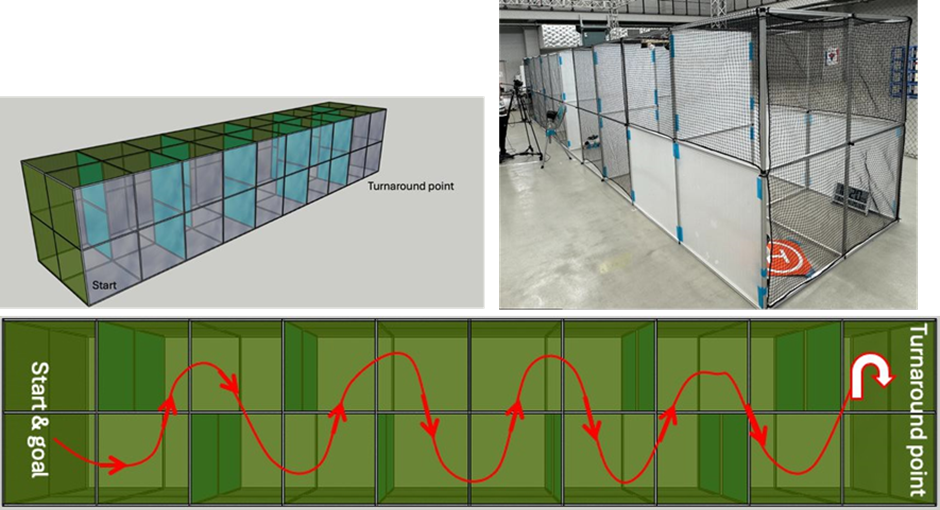
図1.狭隘空間水平スラロームの構造と経路
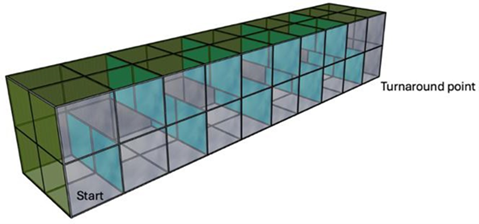
図2.狭隘空間垂直スラロームの構造と経路
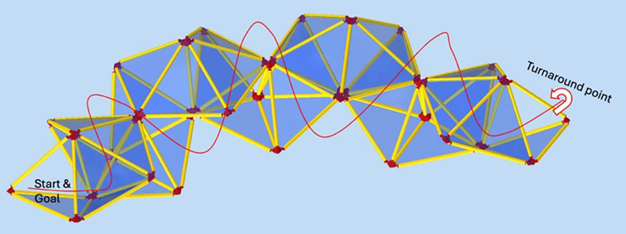
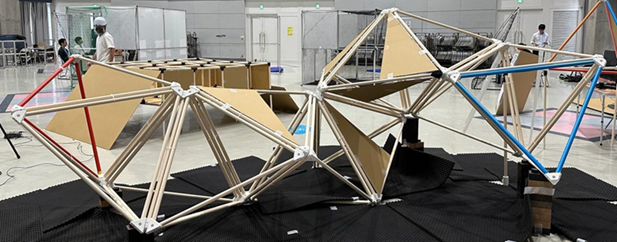
図3.トラストフィールドの概念図と例(ReAMo意見交換会)
※図1〜3は、World Robot Summit 過酷環境F-REIチャレンジ 標準性能評価ドローンチャレンジ 競技ルールVer.1.1から引用。
レイ:FR-1、この前の説明、ありがとう!ドローンが主役になるHEDCとSTMのことが良く分かったけど、二つは何が違うんだろう?どうして二つもドローンの競技があるの?
FR-1:ご質問ありがとうございます。HEDCとSTMは、どちらもドローンが主役となる競技ですが、その目的と評価の焦点に明確な違いがあります。HEDCは「総合力」を試す応用問題、STMは「基礎能力」を測る基礎力問題という位置づけです。
レイ:総合力と基礎能力かぁ。具体的に、HEDCではどんなことが試されるの?
FR-1:HEDCでは、チームは大規模でリアルな災害シナリオに投入されます。ミッションは3つあり、広範囲の偵察、要救助者の発見と物資投下、そして小型ドローンによる建物内部調査を行います。これら全てが連携し、実際の災害現場に近い状況下でのドローンの総合的な運用能力が評価されます。特に、一番遠いミッションの往復距離が30キロに及ぶ点や、通信が途切れがちな山間部などの厳しい地形をクリアする必要がある点が特徴です。
レイ:なるほど、HEDCは本当に実践的なんだね!じゃあ、STMの「基礎能力を測る」っていうのは、どんなふうに測るの?
FR-1:STMでは、狭い空間でのスラロームや、鉄骨が入り組んだトラスフィールドの回避といった、ドローンの基本的な操縦技術や障害物認識能力が試されます。評価基準は「MOB(運動性能)」だけでなく、「EXP(探査性能)」や「MAP(地図作成能力)」など、実際の任務で役立つ能力が数値化されます。特に、「AUT(自律性)」、つまり人間による操縦に頼らず、ドローンが自ら考えて賢く動けるかどうかが重視されます。これは未来の災害対応ドローンの鍵を握る能力です。
レイ:HEDCとSTM、全然違うんだね!すごくよくわかったよ。ありがとう。
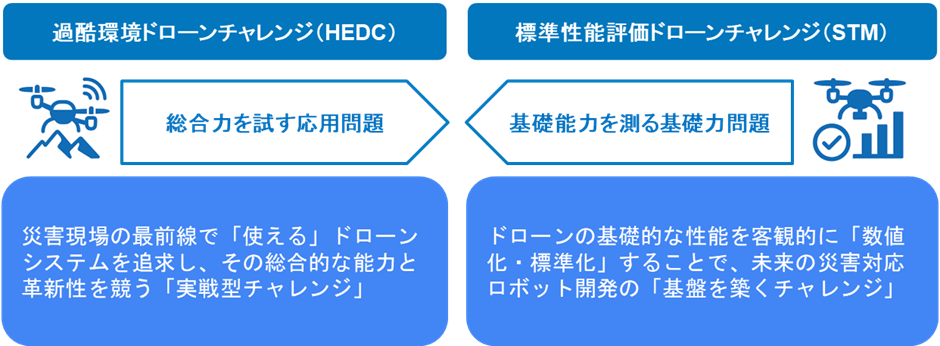
図 過酷環境ドローンチャレンジ(HEDC)と標準性能評価ドローン(STM)チャレンジ